

中機(jī)試驗(yàn)丨材料疲勞試驗(yàn)機(jī)升降與鎖緊技術(shù)

液壓升降與鎖緊
該種形式升降和鎖緊功能采用液壓動(dòng)力實(shí)現(xiàn),通常采用單出桿工程缸帶動(dòng)承載橫梁或加載橫梁上下移動(dòng),當(dāng)移動(dòng)到指定位置時(shí),通過鎖緊缸對(duì)橫梁施加載荷,實(shí)現(xiàn)導(dǎo)向立柱的抱緊。
單出桿缸通常采用摩擦副密封形式,結(jié)構(gòu)簡(jiǎn)單、運(yùn)行平穩(wěn)、工作可靠,常用于實(shí)現(xiàn)簡(jiǎn)單的往復(fù)運(yùn)動(dòng)。
采用鎖緊缸對(duì)橫梁施加載荷,實(shí)現(xiàn)導(dǎo)向立柱的抱緊。將有限元仿真技術(shù)應(yīng)用到橫梁機(jī)構(gòu)的設(shè)計(jì)中,優(yōu)化橫梁結(jié)構(gòu)和鎖緊缸結(jié)構(gòu),實(shí)現(xiàn)鎖緊可靠。
承載橫梁組件在理論軸向靜態(tài)載荷、鎖緊載荷工況下的載荷施加位置及等效固定位置,如圖1所示其中紫色箭頭指向區(qū)域?yàn)殒i緊載荷施加位置,總計(jì)2處,紅色箭頭指向區(qū)域?yàn)檩S向載荷施加位置,綠色網(wǎng)格區(qū)域?yàn)榈刃Ч潭ㄎ恢茫S色網(wǎng)格區(qū)域?yàn)槔碚撟畲笞冃螀^(qū),即等效應(yīng)力最大區(qū)域。
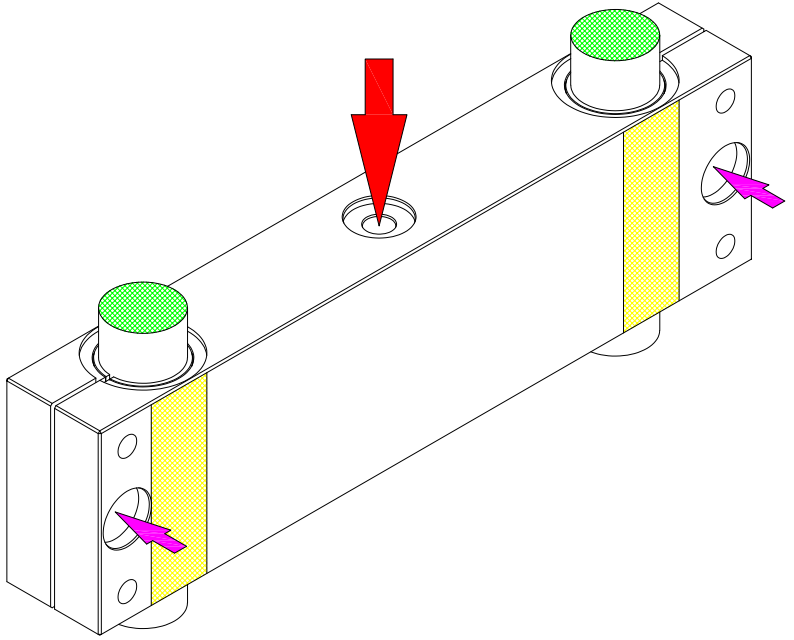
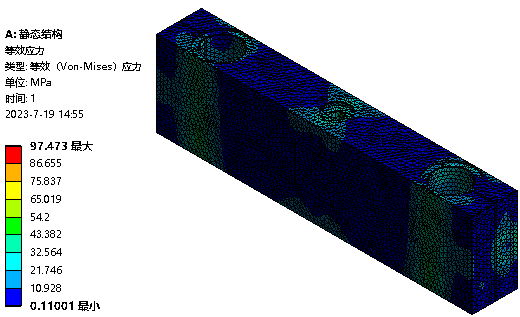
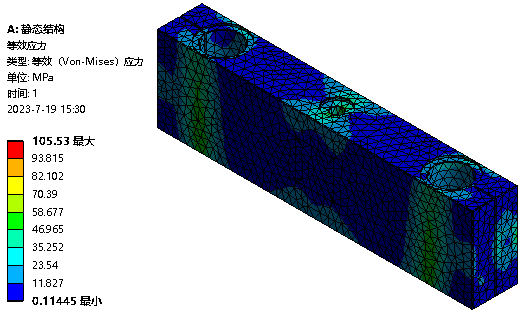
圖2 橫梁升降與鎖緊結(jié)構(gòu)示意圖
控制閥組是液壓升降與鎖緊的邏輯控制單元,通過不同功能液壓閥的組合實(shí)現(xiàn)升降動(dòng)作、速度控制,鎖緊速度和自鎖功能。
電動(dòng)升降與絲杠鎖定
外伺服電機(jī)通過驅(qū)動(dòng)滾珠絲杠帶動(dòng)加載橫梁的上升與下降,通過加載橫梁的實(shí)現(xiàn)試驗(yàn)機(jī)垂向試驗(yàn)空間的調(diào)整,同時(shí)可實(shí)現(xiàn)靜態(tài)力的預(yù)加載以及疲勞加載過程中靜態(tài)力的補(bǔ)償加載;橫梁的鎖緊是通過鎖定絲杠轉(zhuǎn)動(dòng)實(shí)現(xiàn)的橫梁位置不變。
橫梁升降與鎖緊的結(jié)構(gòu)示意圖如圖2所示。
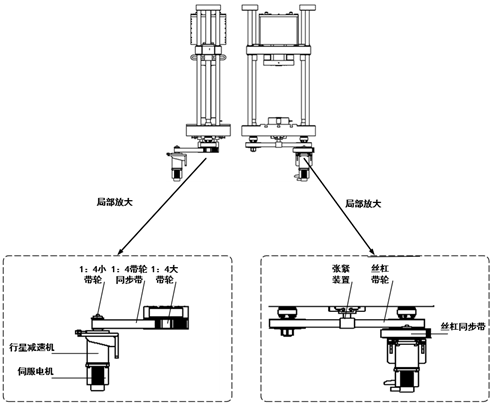
圖2 橫梁升降與鎖緊結(jié)構(gòu)示意圖
橫梁的升降速度即調(diào)節(jié)試驗(yàn)空間的速度取決于電機(jī)轉(zhuǎn)速、效率以及傳動(dòng)過程中的減速比及傳動(dòng)效率;?
滾珠絲杠以及中間多級(jí)傳動(dòng)環(huán)節(jié)均不具備自鎖功能,加載橫梁與支撐立柱的連接關(guān)系不適合做出切口和變形區(qū),雖然導(dǎo)向立柱與加載橫梁適合做此結(jié)構(gòu),但試驗(yàn)過程中需要存在伺服電機(jī)的實(shí)時(shí)補(bǔ)償功能,因此此處鎖緊與補(bǔ)償加載存在時(shí)間差響應(yīng),容易出現(xiàn)失控或頻率保護(hù)等異常問題;結(jié)合以上諸多問題,故此處使用帶剎車的伺服電機(jī),通過電機(jī)軸的鎖止實(shí)現(xiàn)一連串的機(jī)械鎖止。














請(qǐng)先 登錄后發(fā)表評(píng)論 ~